Arduinoでロボットアーム製作02
ロボットアームをロータリーポテンショメータを使って操作できるようにしました。言っておきますが犬マンマは電子工作なんて今までしたこともないし何の知識もありません。あるのはAIがロボットアームを動かすところを見てみたいという好奇心だけです😅
ロータリーポテンショメータというのはボリュームのツマミみたいな形のモジュールです。クリックするとAmazonの頁に飛びます。

接続はこんな感じです。つまみをねじるとカニばさみが回転します。
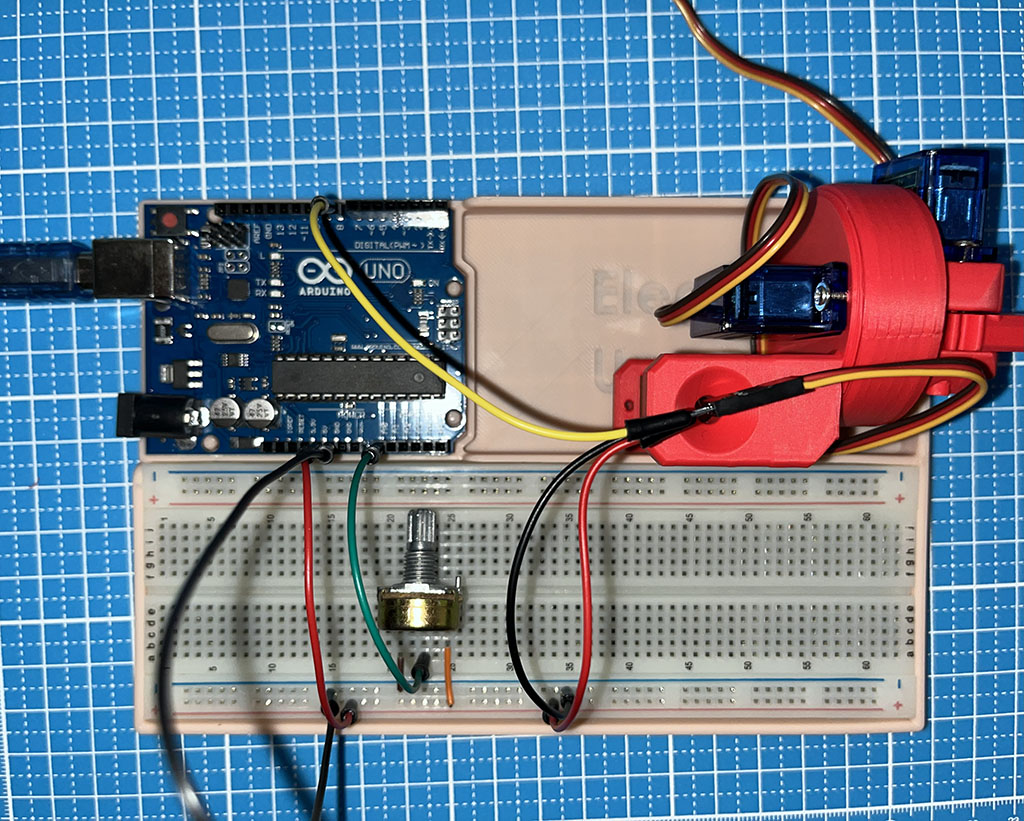
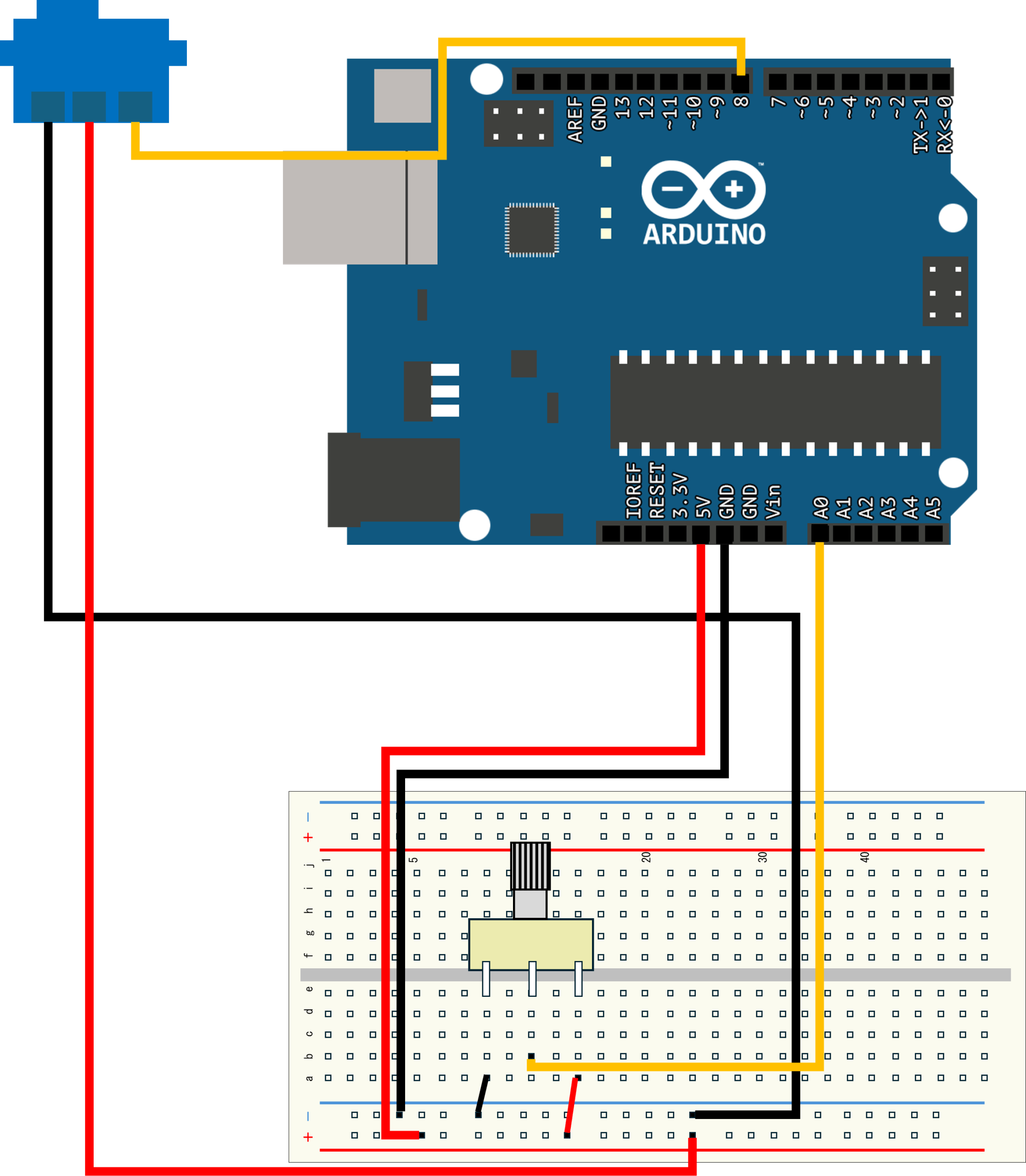
プログラムは前記事のものを改造しました。サーボーは8番に接続してロータリーポテンショメータはアナログピンのA0に接続しています。mapはロータリーポテンショメータの数値(0-1023)を角度(0-180°)に変換しています。
#include <Servo.h>
Servo srv;
int intPin = A0;
int intVal;
void setup() {
srv.attach(8);
}
void loop() {
intVal = analogRead(intPin);
intVal = map(intVal,0,1023,0,180);
srv.write(intVal);
delay(15);
}
結果
つまみを回すと同じくカニばさみもまわりました。